Planetary Gearbox [2025]
Summary and Key Details
Designed an 8:1 planetary gearbox delivering 12.75 Nm continuous torque at 79.5% efficiency
Implemented a floating shaft support to compensate for axial tolerance stacks affecting bearing performance
Developed a parameterized involute spur gear generator on SOLIDWORKS for the ring, sun, and planetary gears


Specifications
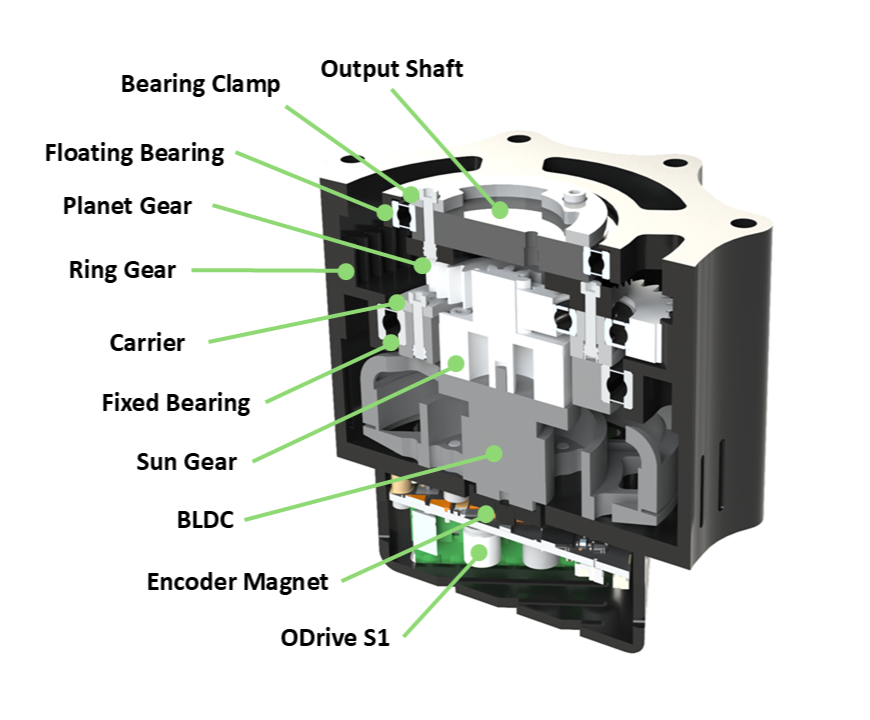
8:1 Planetary Gearbox with Spur Gears
ODrive S1 FOC with Onboard Encoder
Floating Bearing Shaft Support Structure
Continuous Torque: 12.75 Nm
Backdriving Torque: 0.3 Nm
Efficiency: 79.5%
Total Mass: 1.03 kg
Lubrication - White Lithium Grease
Photos and Videos
Close-up Video
High-Speed (Real-time Video)
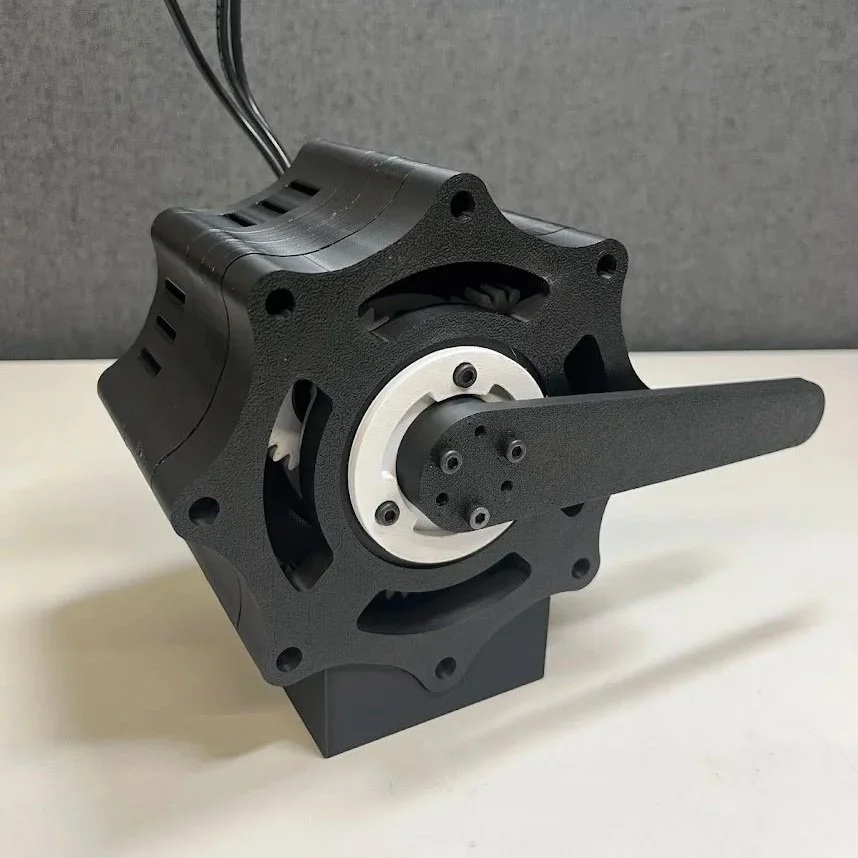
Isometric View
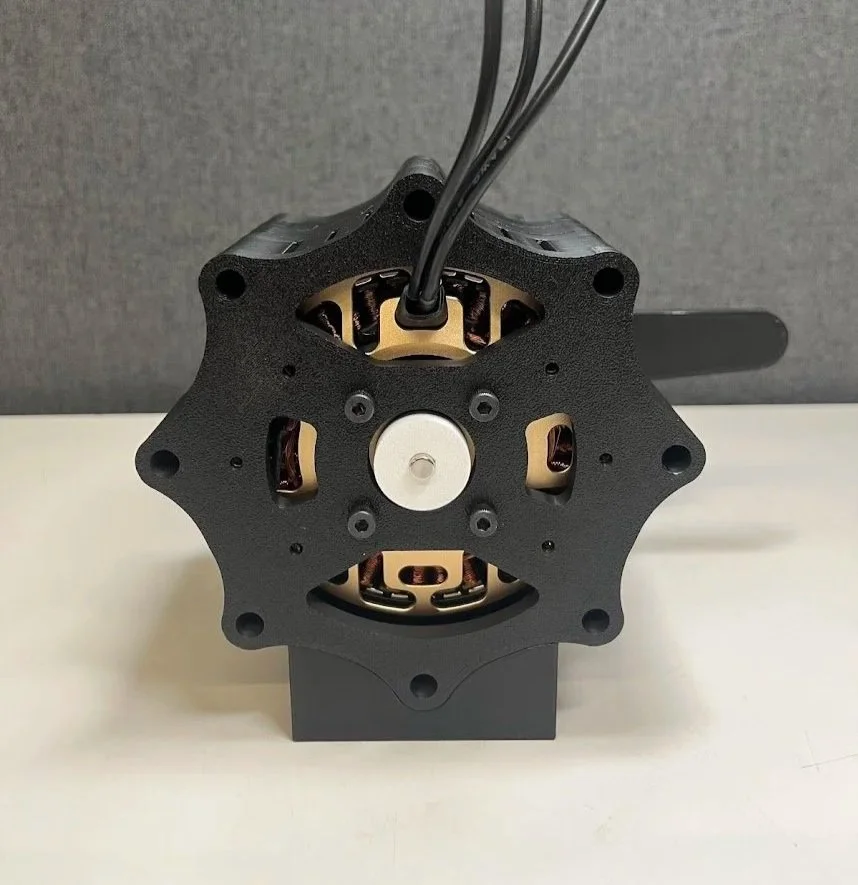
Back View (Encoder)
Actuator Scale
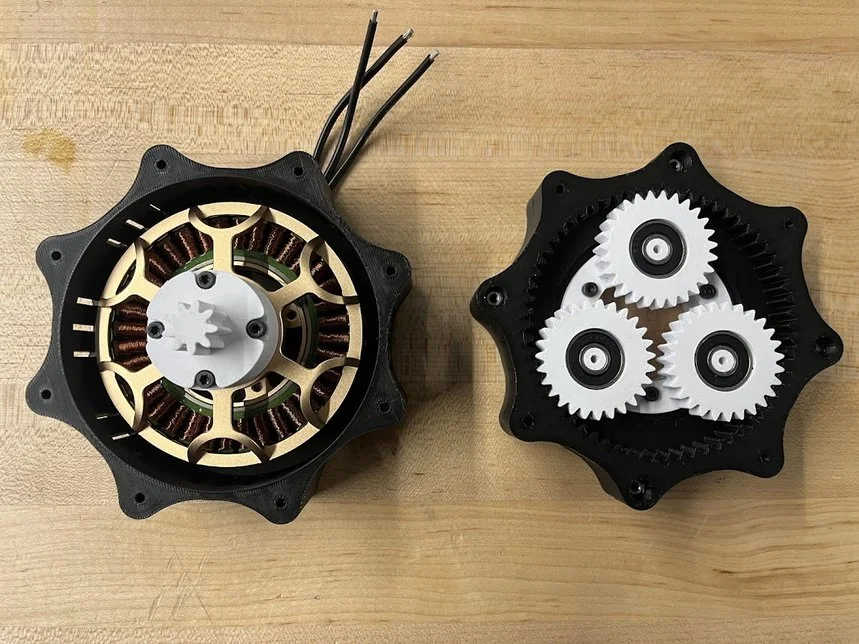
Motor and Gearbox
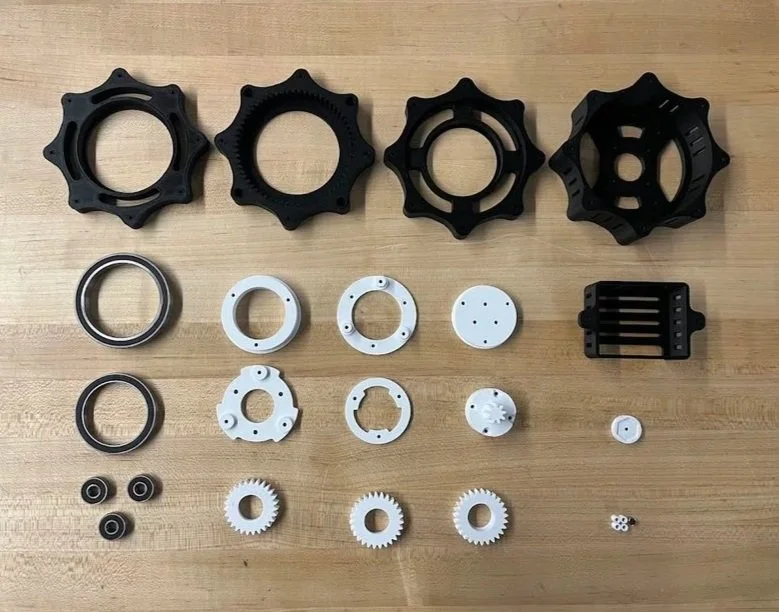
3D Prints and Bearings
Actuator Mass


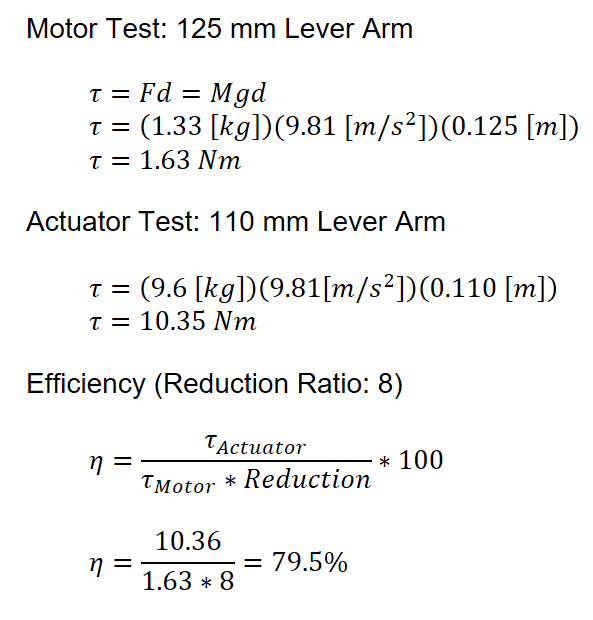
Efficiency and Torque Testing
Actuator efficiency was measured by comparing motor torque to gearbox torque. The videos shown are the test setups used. The recorded values differ from those used in the efficiency calculations, as the motor kV was tested and tuned after these videos were taken, and the tests were performed again.
Motor Torque (~70% Continuous Current)
Actuator Torque (80% Continuous Current)
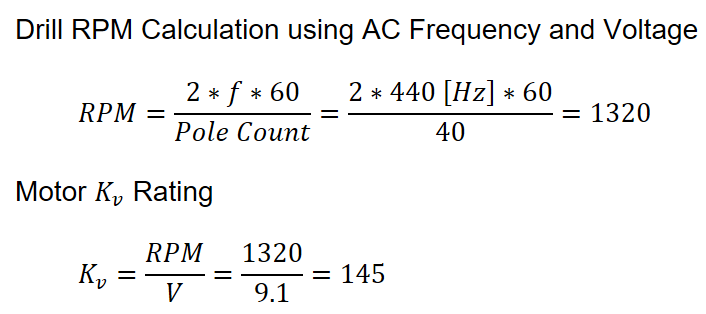
Motor Testing - kV
I chose the Eaglepower 8308 Kv90 motor because its outrunner style rotor and low Kv rating gave it a high torque-per-amp specification.
However, testing with a drill and multimeter showed the actual Kv was higher than expected, resulting in lower torque at the rated continuous current.
For the next design, I may need a higher reduction ratio to meet the project’s torque requirements.

3D Printing
This gearbox went through several design and 3D-printing iterations to get the bearing and gear fits right. The comparison video below shows why this tuning mattered - getting the right gear backlash reduced play without causing the gears to bind.
1st Print - Binding Gears
Improved Backlash