6-DOF Robot Arm [2026]
Summary and Key Details
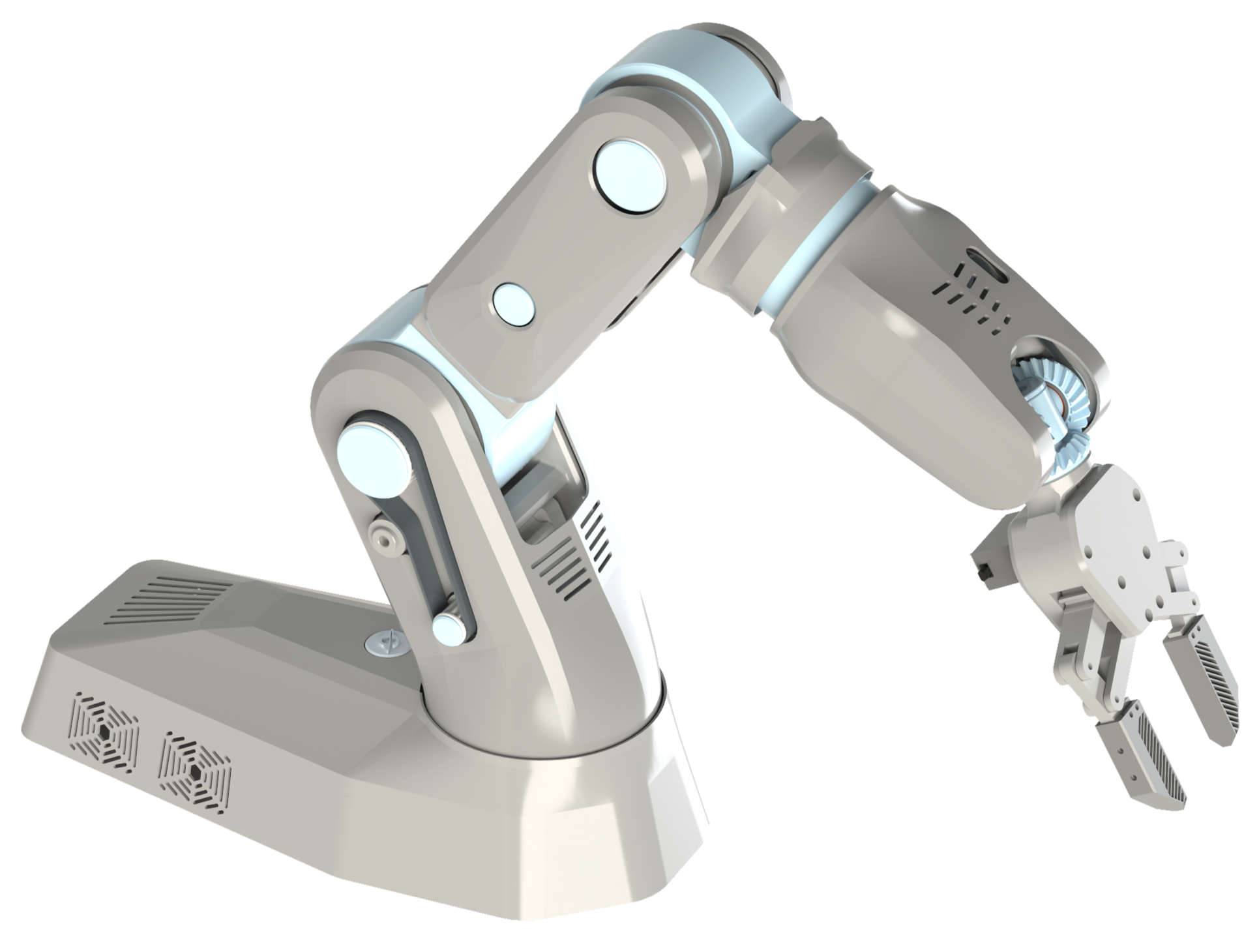
A robotic arm with cycloidal and planetary gearboxes, capable of dexterous manipulation and lifting 1.5 kg while costing under $300
Compliant gripper with a differential wrist mechanism, enable the ability to reliably grasp irregular objects in constrained spaces
Implemented mechanical hard stops, active cooling for electronics, and magnetic a-surface panels for aesthetics


Mechanical Subsystems
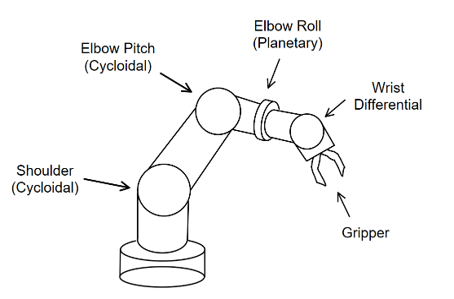
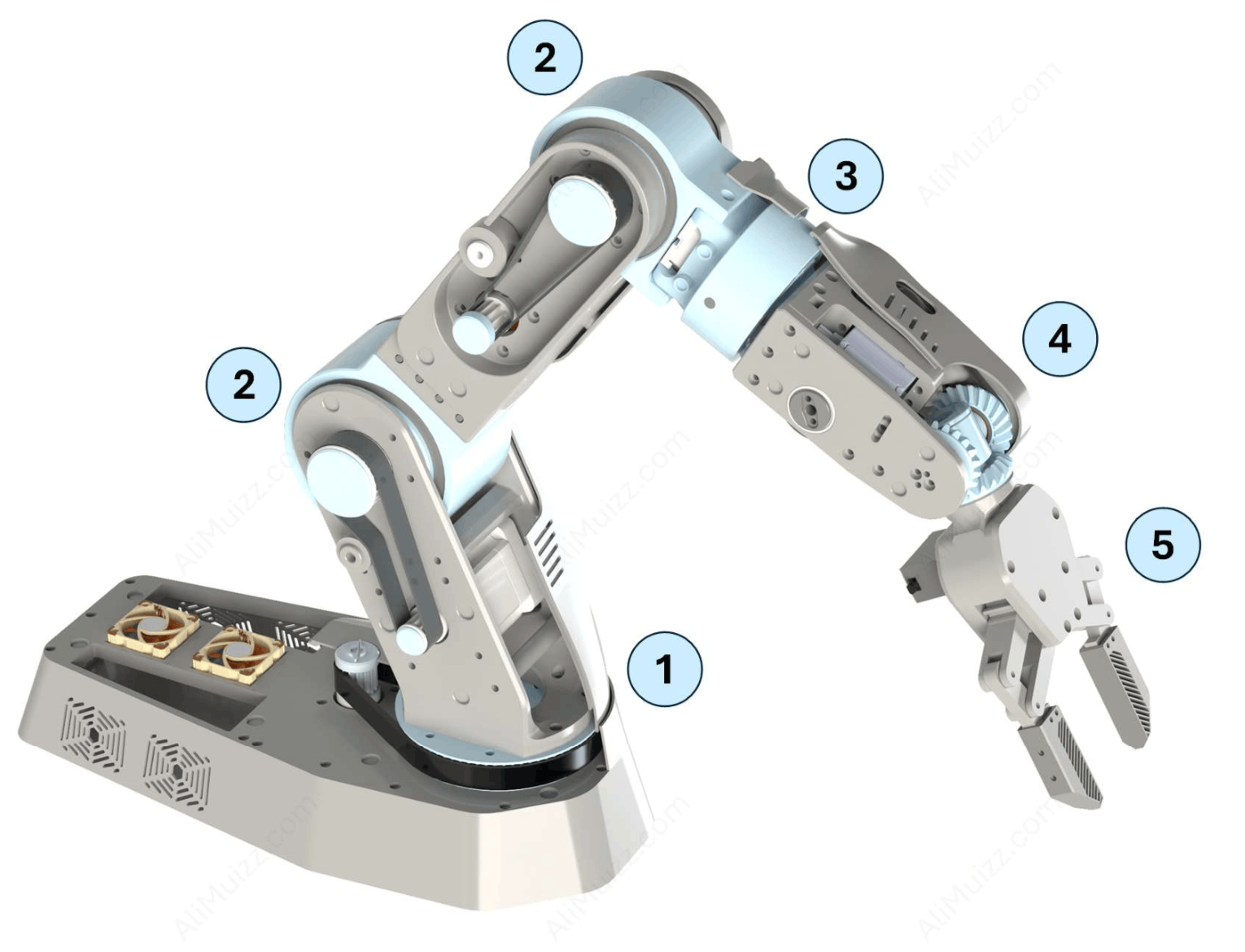
The mechanical design consists of 6 main subsystems.
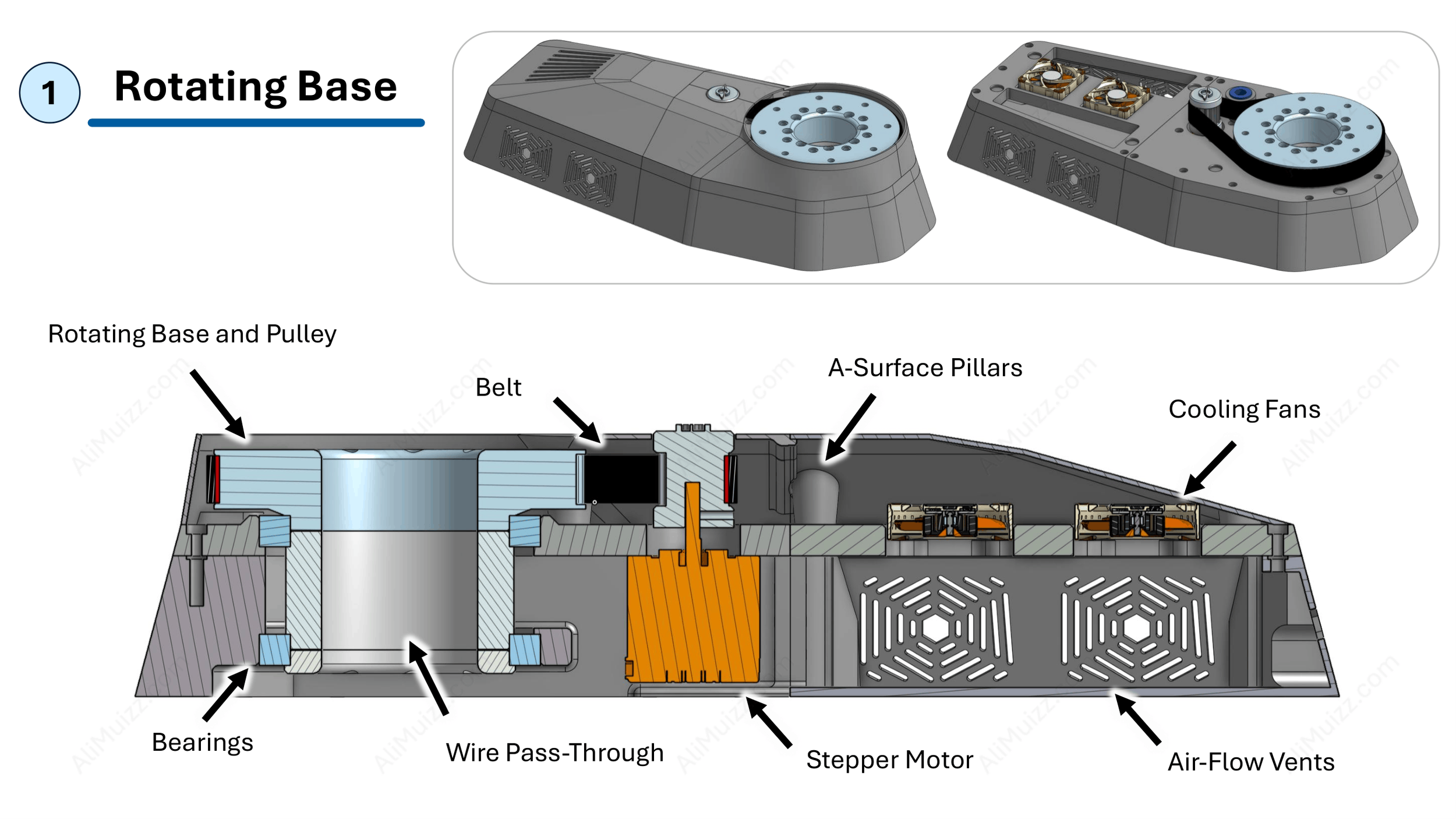
[1] Rotating Base: Belt-Driven Motion, also acts as the electronic enclosure with active cooling using two fans
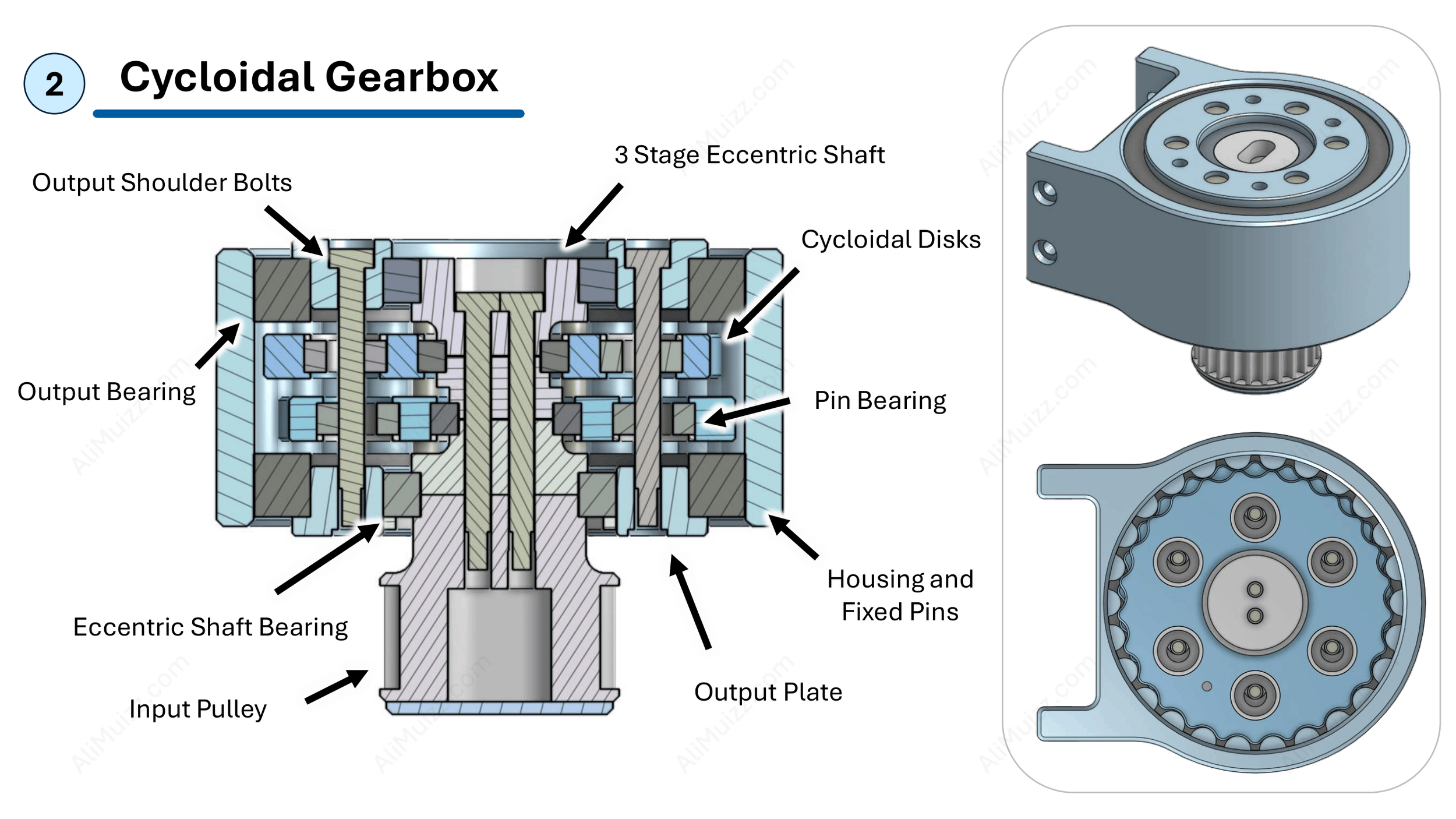
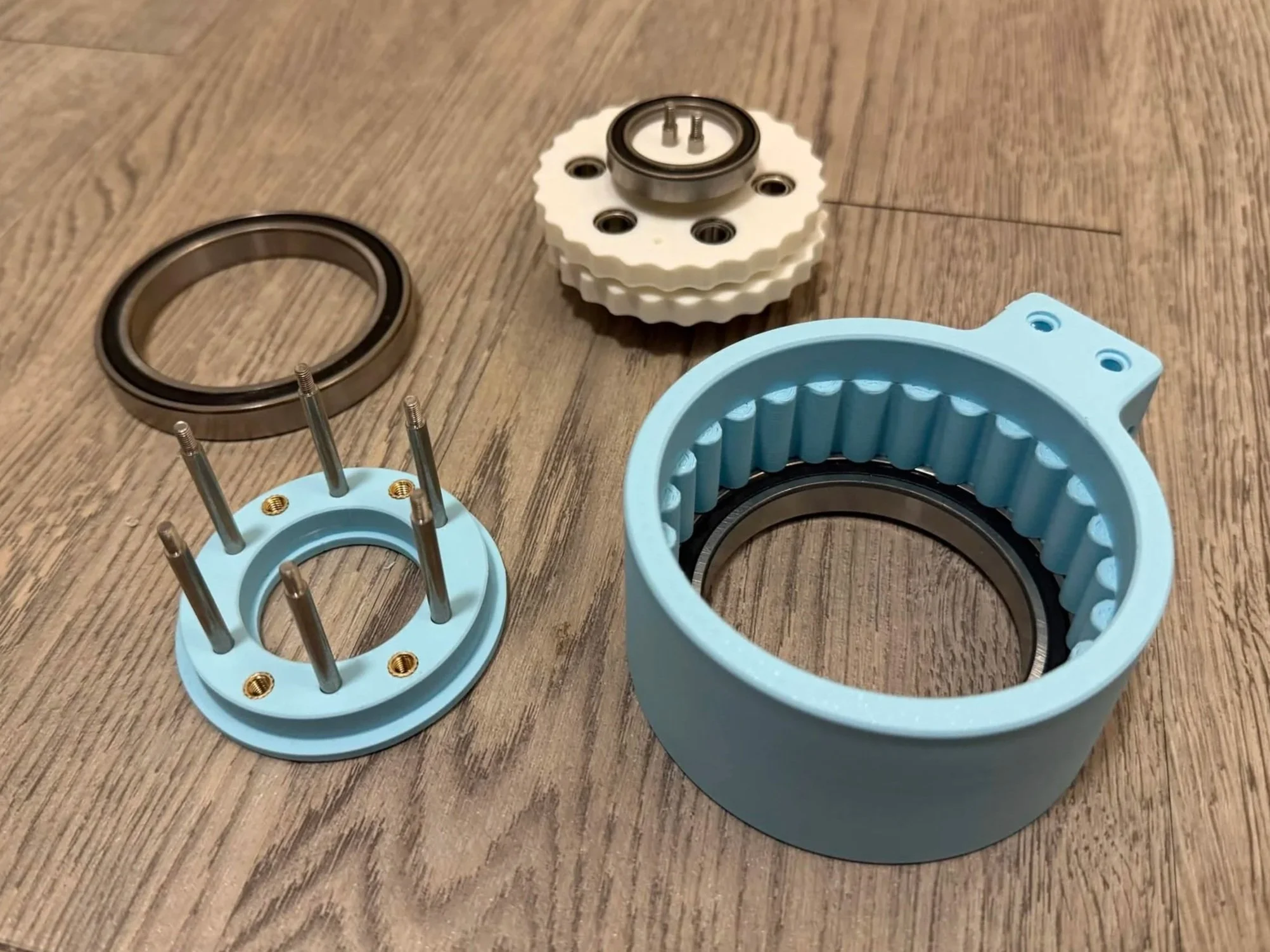
[2] Cycloidal Gearbox: Utilized in the shoulder and elbow pitch joints, driven by a belt and utilizing the housing as the output
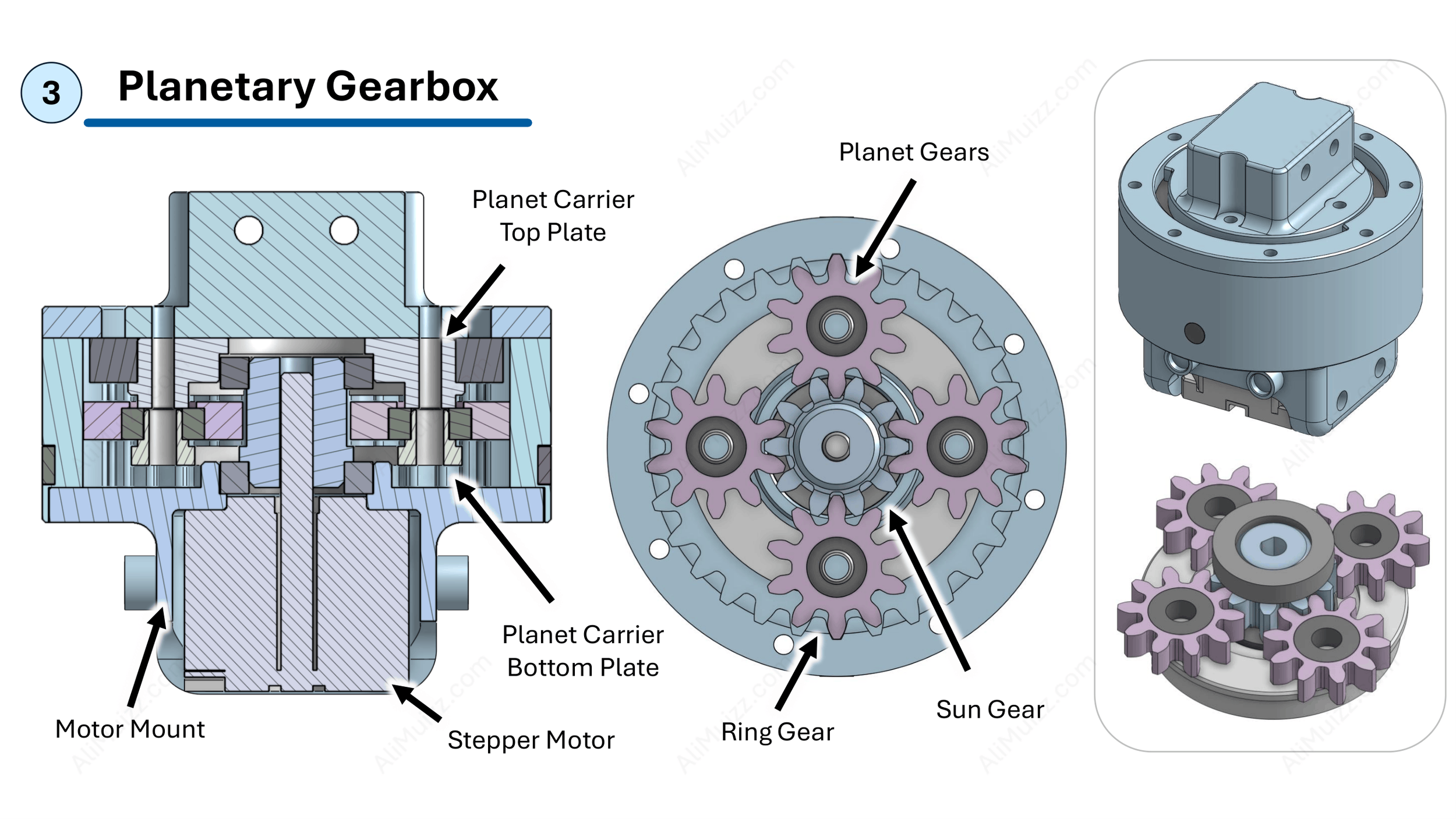
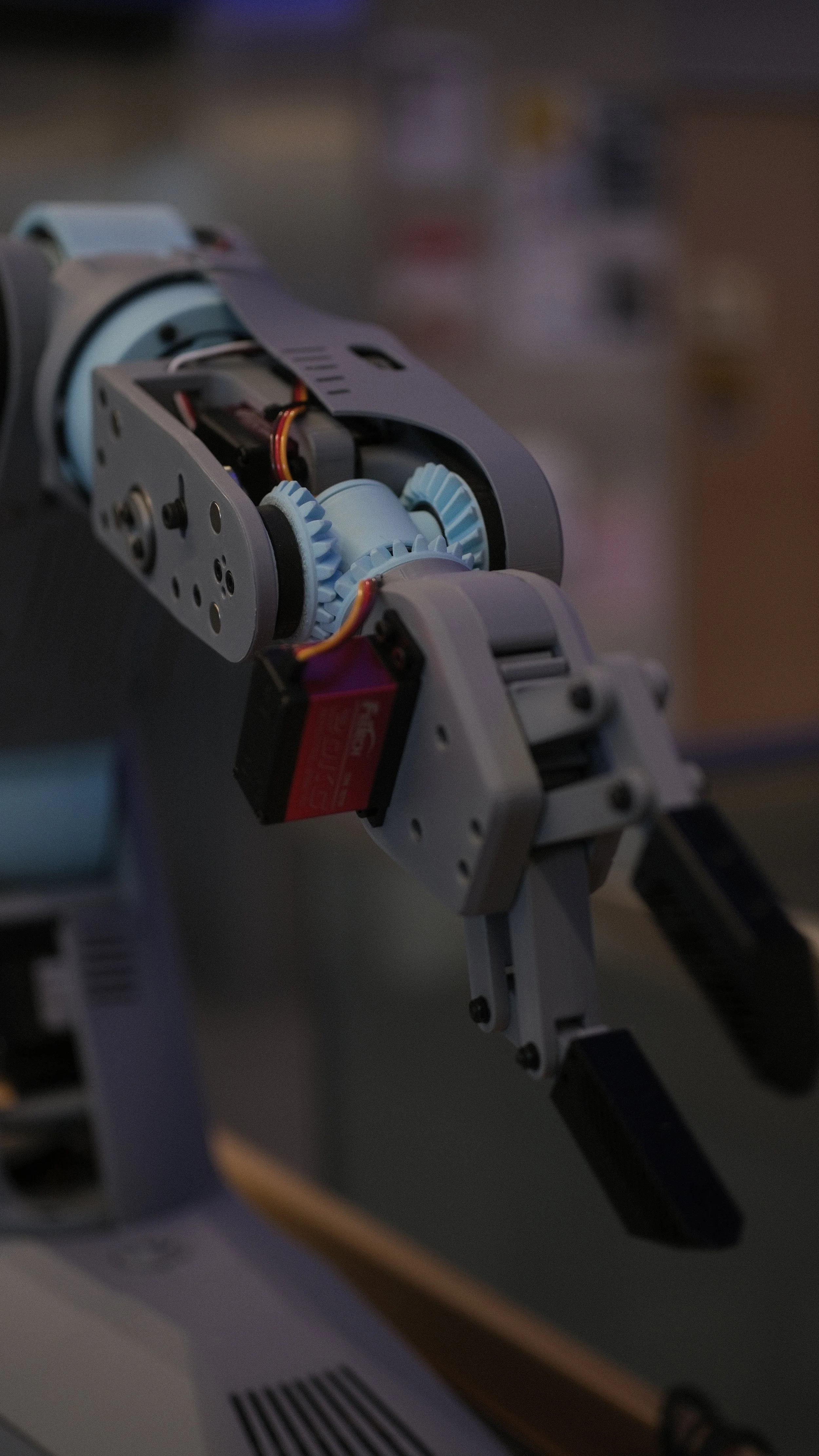
[3] Planetary Gearbox: Provides the 6th DOF (elbow roll) which allows the gripper to pitch sideways instead of vertically
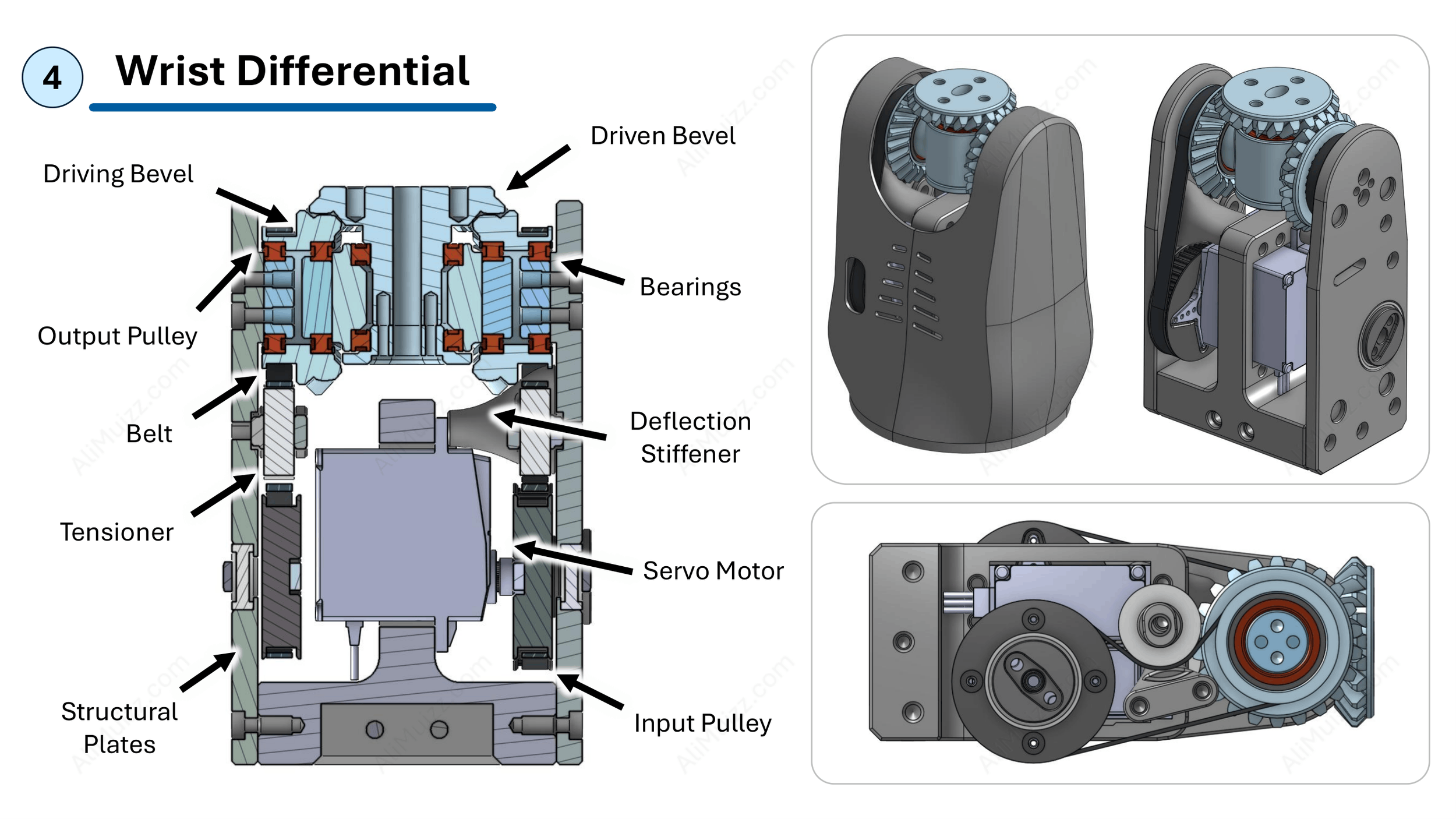
[4] Wrist Differential: Bevel gear differential enabling both wrist articulation and gripper roll
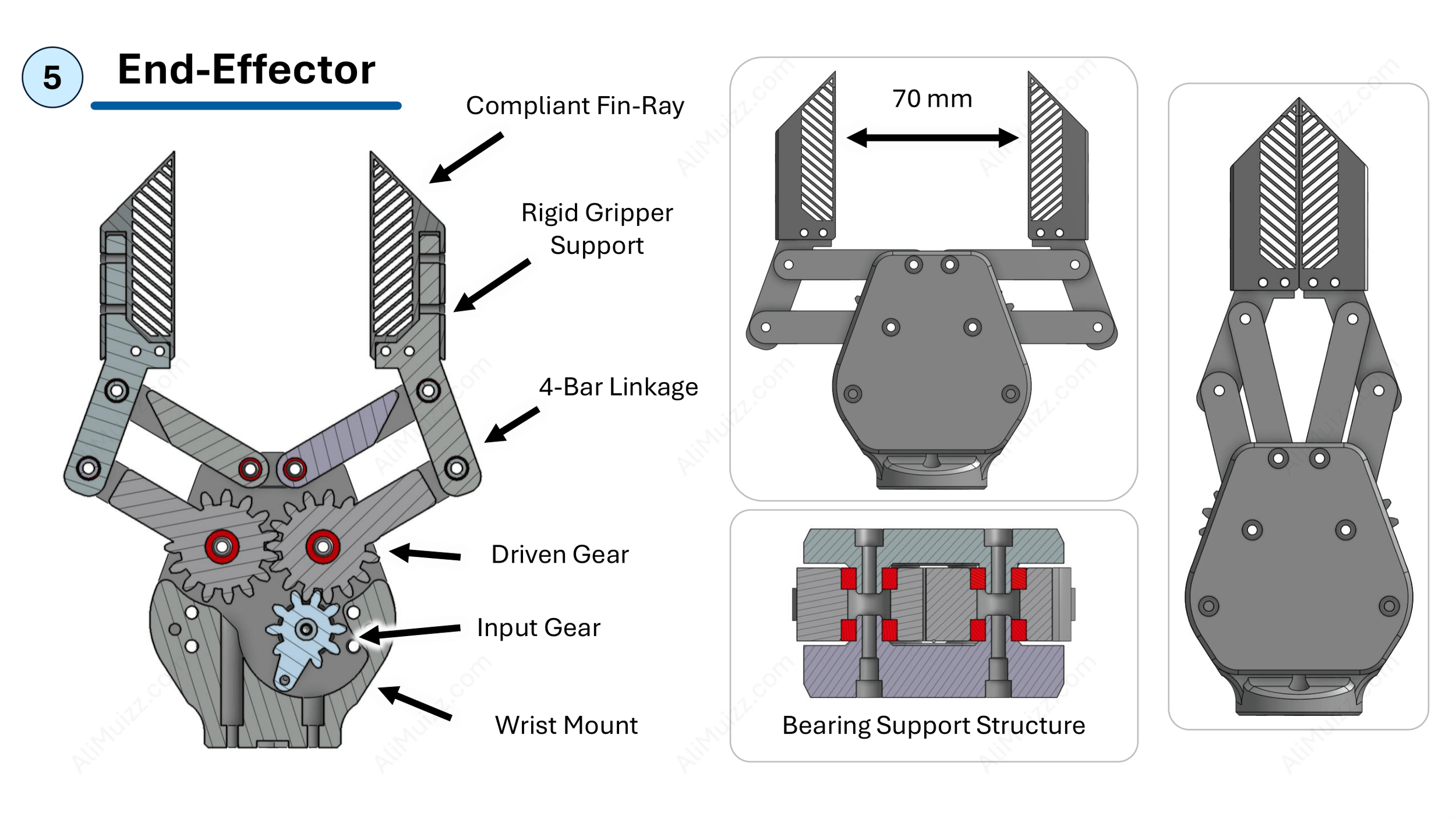
[5] End-Effector: A parallel 4-bar linkage with fin-ray grippers providing compliance to grasp difficult objects
Compliant Gripping
Demonstration of the gripper securely grasping objects across a range of shapes and geometries
Billiard Ball
Mouse
Egg
Pencil
Photos and Videos
Design Iterations

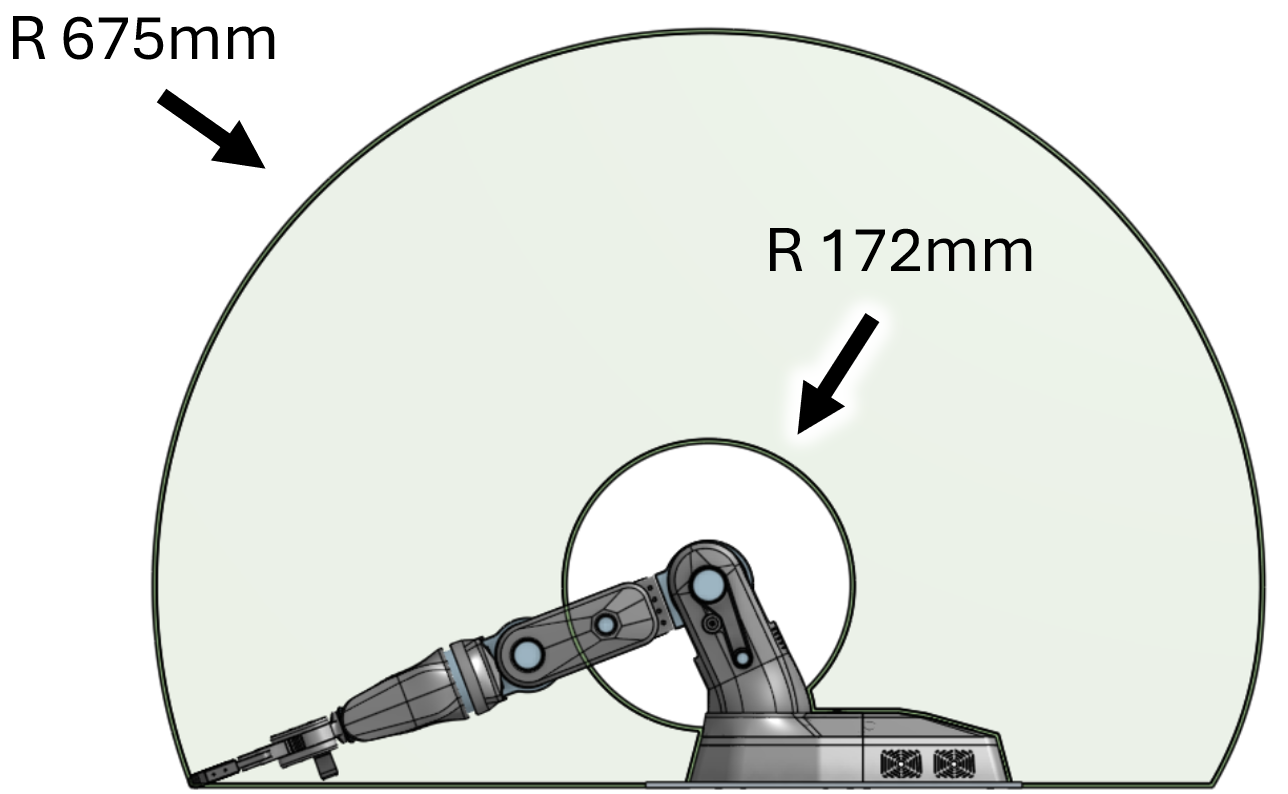
Range of Motion Plot
Cycloidal Gearboxes

Cycloidal Components
Shoulder and Elbow Assemblies

Elbow Pitch + Elbow Roll

A-Surface Panels Removed

Differential and Belt Drives

Electronics

Design Specifications
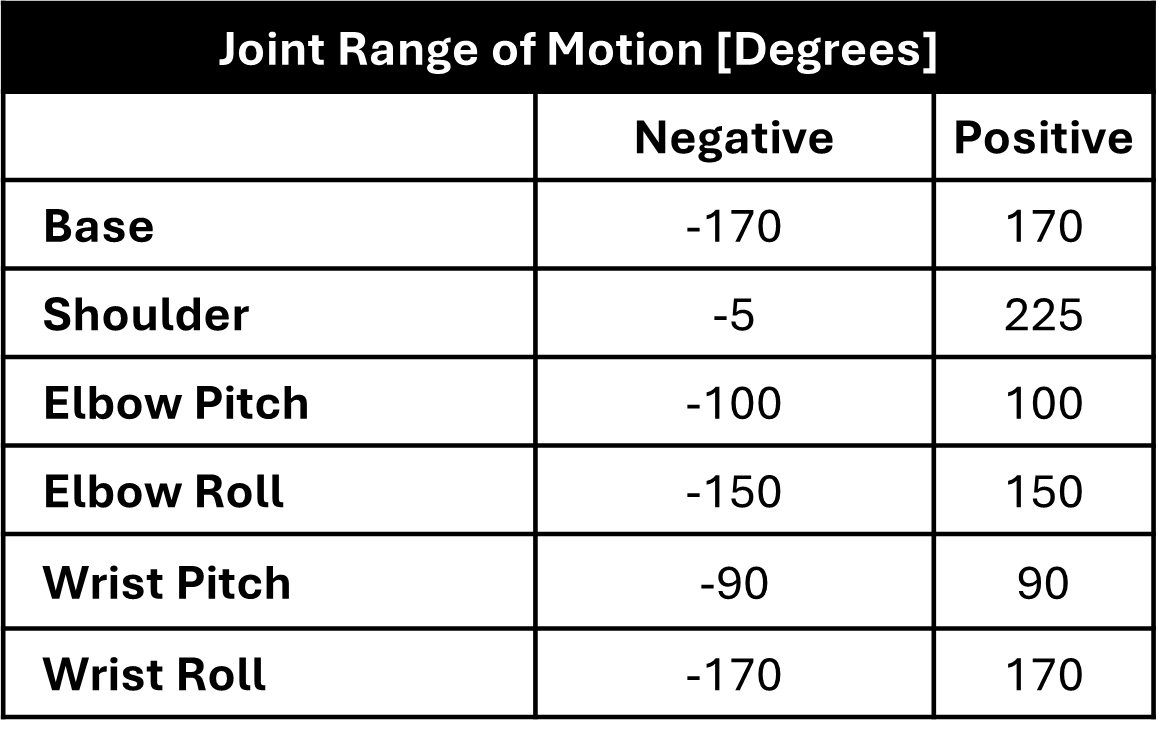
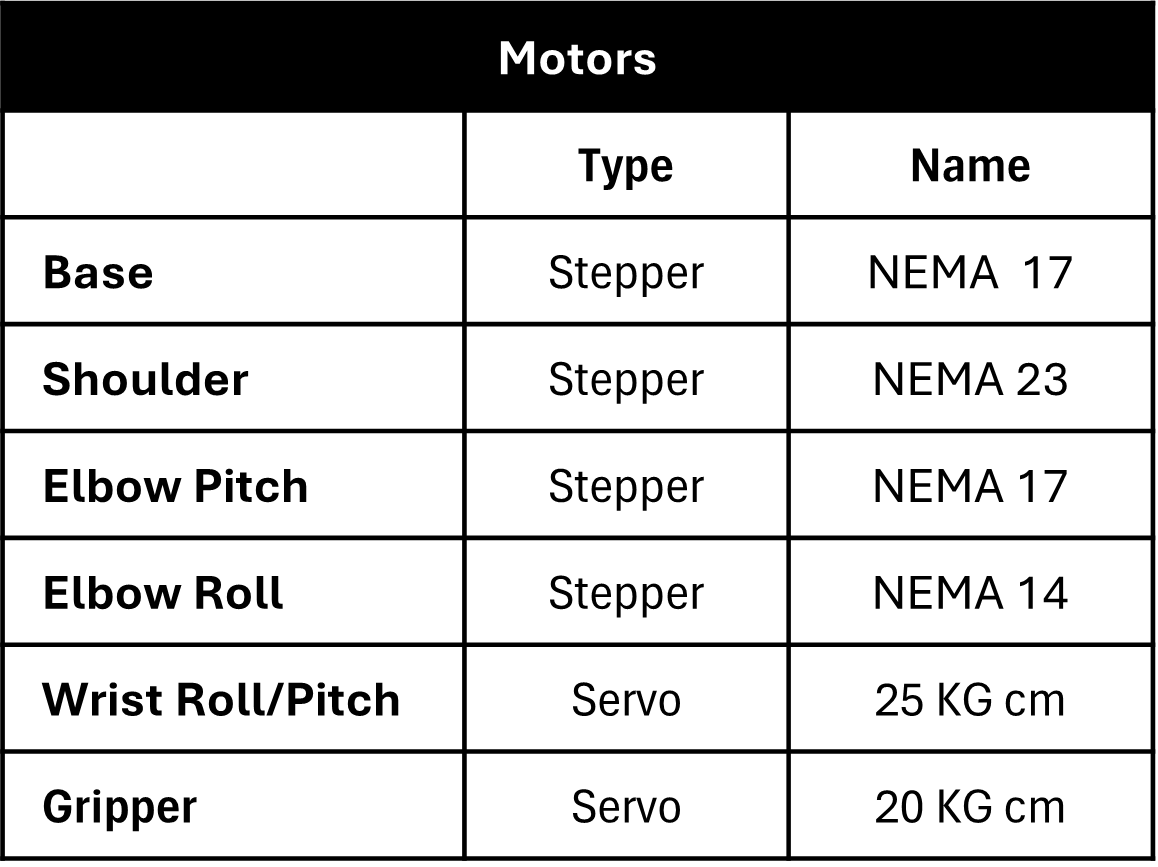
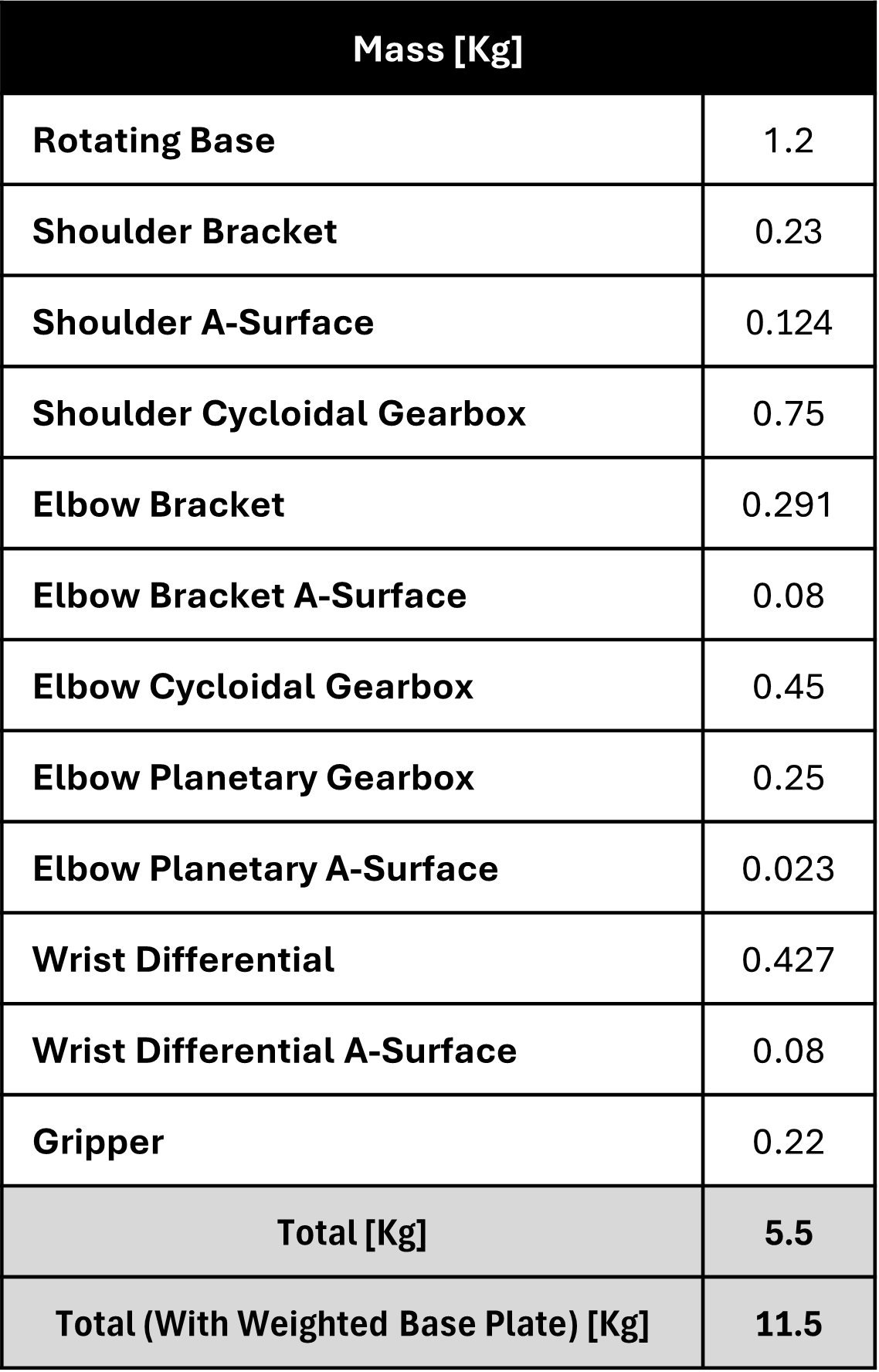
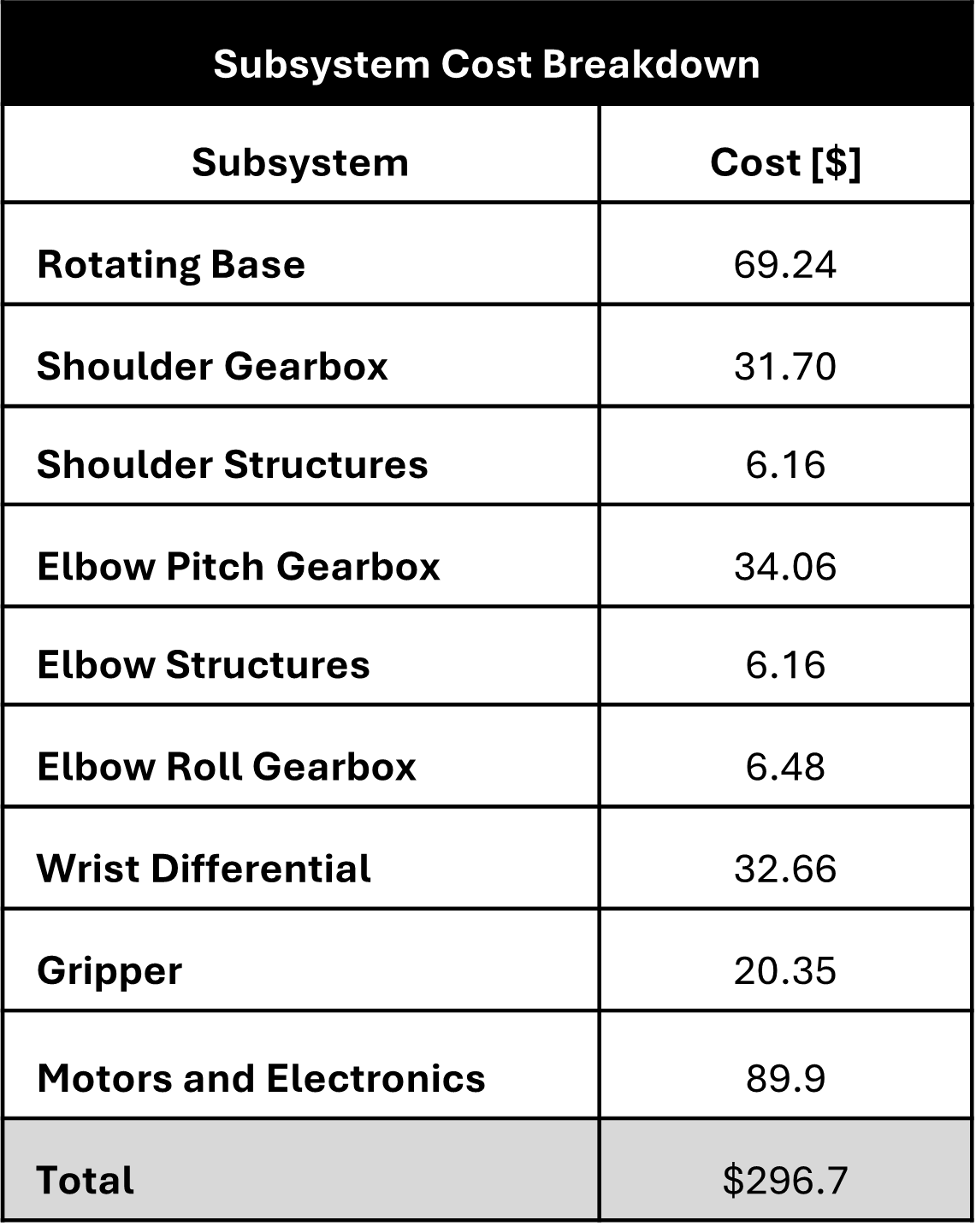
The main specifications defining the design of the robot are depicted in the tables below. This includes:
The range of motions determined by mechanical hard stops for each joint
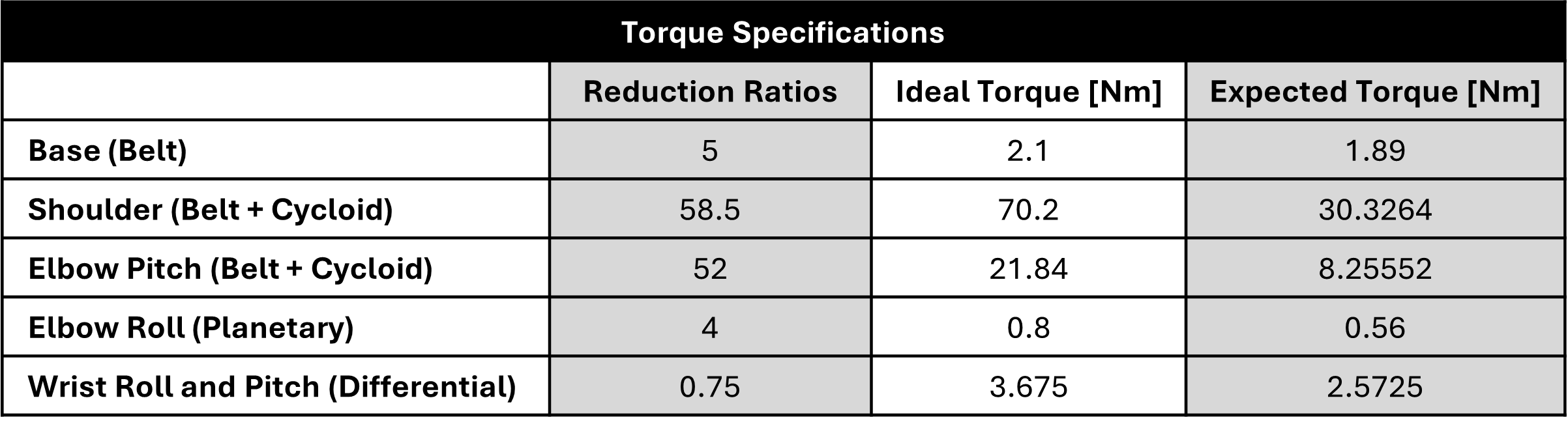
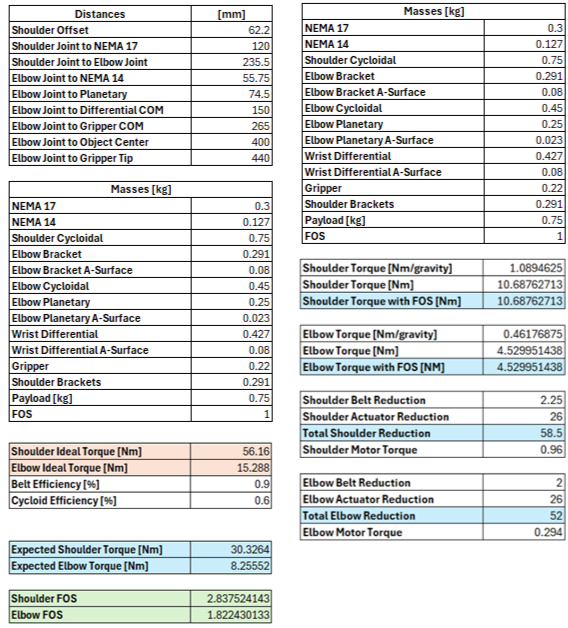
Torque ratings, assumed/tested efficiencies, and calculations
The mass and cost breakdown of each subassembly